Sistema Modular de Movilidad Aérea en Capas + Infraestructura Láser de Navegación, Conectividad y Energía
Documento Ejecutivo Estratégico (v1.0)









1) Visión general
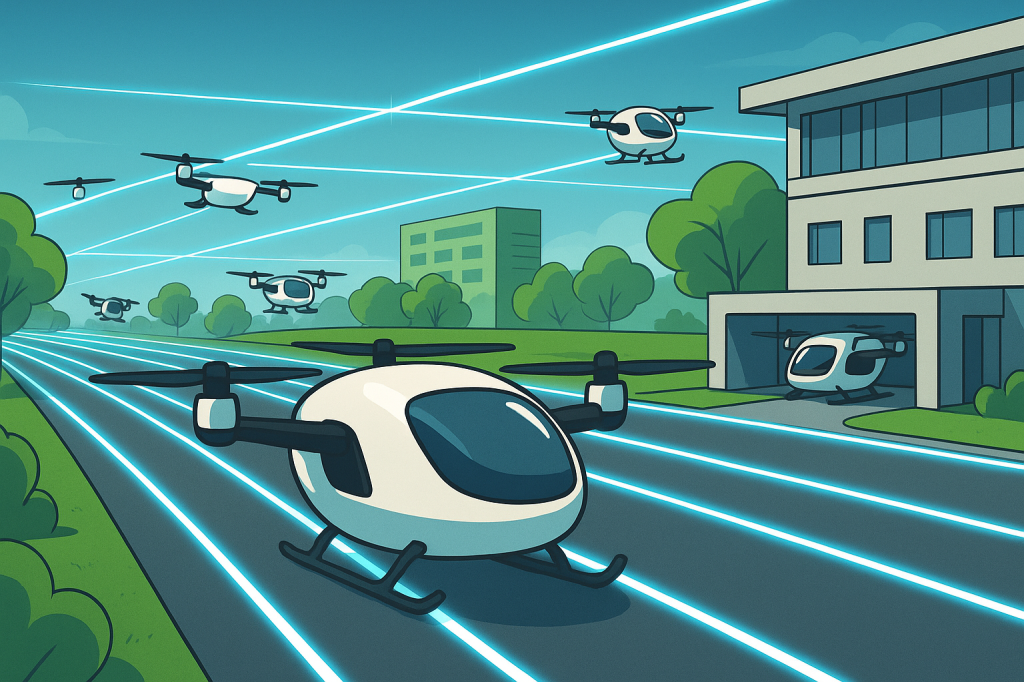
LaserDron es un sistema de movilidad aérea modular (pasajeros, carga, emergencias) diseñado para sustituir progresivamente el paradigma terrestre urbano basado en combustibles y congestión. Su ventaja central es que no se limita al “vehículo”: se apoya en LaserSat, una infraestructura de guiado, conectividad y energía que convierte el espacio aéreo urbano en una red operable, regulable y escalable.
En términos de ciudad, LaserDron + LaserSat no es “transporte”: es una nueva matriz de circulación que reduce fricción logística, descomprime el suelo urbano y habilita corredores aéreos controlados por IA.
2) Definiciones clave (conceptos)
2.1 LaserDron (vehículos y flota)
Conjunto de plataformas eVTOL y drones de carga, diseñados bajo principios de:
- Modularidad (cabinas / cápsulas intercambiables; variantes por capacidad)
- Estándares de acople (para hubs y sistemas nodales)
- Operación autónoma y asistida (según fase regulatoria)
- Mantenibilidad industrial (diagnóstico, recambio rápido, mantenimiento predictivo)
2.2 LaserSat (infraestructura sistémica)
Capa de infraestructura compuesta por nodos urbanos y enlaces ópticos/radio que provee:
- Navegación de alta precisión y control de flujo
- Conectividad “aérea” como red de respaldo o alta disponibilidad
- Soporte energético (enfoque en carga, distribución y optimización energética)
Nota de diseño: LaserSat no “reemplaza” todo lo existente; funciona como capa de coordinación y redundancia, acelerando adopción y seguridad operativa.
2.3 Movilidad en capas (Air-Lanes 3D)
Organización del tráfico aéreo urbano en capas de altitud y corredores virtuales (rutas unidireccionales, carriles múltiples en demanda alta), con separación por:
- tipo de vehículo (pasajeros / carga / emergencias)
- velocidad
- prioridad
- condiciones climáticas
2.4 Control de tráfico tipo enjambre (Swarm Traffic Control)
IA distribuida que gestiona:
- asignación dinámica de rutas
- separación segura
- slots de despegue/aterrizaje
- contingencias climáticas y emergencias
- optimización de tiempos y consumo energético
3) Arquitectura del sistema (componentes)
3.1 Vehículos LaserDron: familias operativas (modelo por niveles)
Nivel A – Microcarga urbana (0–10 kg)
- Última milla, medicina, e-commerce, logística rápida.
Nivel B – Carga media / servicios urbanos
- Reposición, logística B2B, soporte municipal.
Nivel C – Pasajeros (1–4 / 2–6)
- Taxi aéreo urbano y periurbano; prioridad de adopción en fase piloto.
Nivel D – Interurbano regional (corredores)
- Conecta ciudades cercanas bajo rutas definidas; habilita reducción fuerte de tiempo.
Recomendación: Presentar “niveles” como familias de producto y no como promesa de capacidades extremas desde el inicio. Los saltos de velocidad y autonomía se modelan por fases.
3.2 Grilla Láser Urbana (GLU) como capa de coordinación
Una GLU es una red de nodos urbanos (cada X cuadras/metros según densidad) que provee:
- referencia espacial y geocercas
- delimitación de carriles aéreos
- telemetría, monitoreo y control
- enlaces de datos para baja latencia (cuando aplica)
Ventajas
- reduce incertidumbre de navegación
- aumenta seguridad regulatoria (rutas explícitas)
- facilita auditoría y cumplimiento
- permite escalar por densidad de nodos
3.3 Estaciones verticales de operación (EDV: pads + hubs)
Infraestructura mínima viable:
- pads en techos, hospitales, nodos logísticos
- estaciones de recarga y mantenimiento
- automatización progresiva (diagnóstico, recambio, inspección)
4) Plan piloto: ciudad laboratorio (modelo Mar del Plata como ejemplo replicable)
Fase 1 — Activación inicial (0–12 meses)
- TaxiDrones en rutas controladas + Drones delivery
- Hubs perimetrales (park & fly) para reducir presión en el centro
- Primer corredor “ciudad ↔ nodos críticos” (hospitales, centros comerciales, logística)
Objetivo: demostrar seguridad, aceptación, unit economics y tiempos.
Fase 2 — Restricción progresiva del vehículo terrestre (12–36 meses)
- Zona central con acceso terrestre limitado (excepciones: emergencia, logística esencial)
- Aumento de cobertura aérea + densificación de pads
- Integración con servicios públicos (salud, seguridad, emergencias)
Objetivo: caída medible del tráfico terrestre y reconfiguración urbana.
Fase 3 — Expansión regional (24–60 meses)
- Corredores interurbanos (ciudad ↔ ciudades adyacentes)
- Rutas dedicadas sobre trazas seguras (paralelas a rutas terrestres)
- Estándares de interoperabilidad con flotas privadas
Objetivo: pasar de “piloto” a “red”.
5) Resultados esperables (métricas realistas por etapa)
En vez de prometer “cero accidentes / 90% menos tráfico” como absoluto, se plantea como KPIs verificables:
- reducción de tiempos promedio en rutas objetivo
- reducción de congestión en zonas intervenidas
- disminución de emisiones locales vinculadas a movilidad (por sustitución de viajes)
- reducción de costos logísticos en última milla
- adopción (viajes/día) y satisfacción del usuario
- disponibilidad de flota (uptime) y tasa de incidentes
6) Energía y sostenibilidad (capas)
6.1 Enfoque inmediato (implementable)
- energía de red + microredes locales (solar + almacenamiento)
- optimización de carga por software (horarios, demanda, precios, congestión energética)
- pads y hubs diseñados como “nodos energéticos”
6.2 Enfoque avanzado (horizonte tecnológico)
- integración con fuentes energéticas de alta densidad (cuando estén disponibles y certificadas)
- transferencia energética dirigida (aplicable en escenarios específicos, bajo regulación)
Clave de credibilidad: separar Fase Operativa (hoy) de Fase Horizonte (I+D).
7) Escalabilidad global (modelo replicable)
7.1 Patrón de réplica
- implementación por zonas (distritos)
- expansión por corredores
- estandarización de pads/hubs
- acuerdos regulatorios por “capas” (carga primero, pasajeros después)
7.2 Ecosistema industrial
Para escalar, LaserDron + LaserSat requiere:
- consorcio de proveedores de drones (pasajeros/carga)
- integradores de infraestructura (pads, hubs, microredes)
- software de control y compliance (UTM/ATM urbano)
- mantenimiento y supply chain local (empleo y desarrollo)
8) Requisitos para implementación (ejecutivo)
- inversión piloto estimada (CAPEX/OPEX) definida por: tamaño de ciudad, cantidad de pads, flota inicial, centro de control, permisos
- marco municipal: corredores aéreos, pads, zonas de prioridad, normativas de ruido y seguridad
- consorcio público/privado para financiación, operación y escalado
- plan de comunicación ciudadana (aceptación social + transparencia de seguridad)
9) Seguridad, cumplimiento y gobernanza operativa
El factor decisivo para aprobación es la seguridad verificable:
- redundancia sensorial (visión, LIDAR/radar, GNSS + referencias locales)
- geocercas y rutas auditables (LaserSat/GLU como capa de cumplimiento)
- sistemas de aborto y contingencias
- trazabilidad de mantenimiento (logbooks, inspecciones, piezas)
- ciberseguridad: identidad de vehículo, comunicación cifrada, hardening de firmware
- auditoría y reporting para autoridades
10) Módulos especiales (opcional, por madurez)
10.1 Interfaz usuario–vehículo (sin claims extremos)
- comandos por voz, app, gestos
- HUD informativo (estado, ruta, seguridad)
- experiencia centrada en confianza (transparencia de decisiones IA)
10.2 Uso de cruces urbanos como pads temporales (concepto)
Puede explorarse como piloto “ligero” bajo control:
- ventanas cortas de exclusión
- señalización lumínica/sonora
- protocolos de seguridad y evacuación
Debe presentarse como ensayo regulado (no como despliegue masivo inmediato).
11) Conclusión
LaserDron + LaserSat define una matriz integrada de movilidad aérea en capas, con una infraestructura que permite control, seguridad, conectividad y escalado.
No se trata de “hacer volar drones”:
- se trata de convertir el cielo urbano en un sistema operativo
- con despliegue por fases
- con KPIs medibles
- con arquitectura replicable a escala global
El futuro post-congestión no requiere décadas de obra: requiere un sistema modular, estándares claros y una ejecución piloto impecable.
Contacto institucional
© 2026 SpaceArch Solutions International, LLC, Miami, Florida, USA. All rights reserved. No part of this document may be reproduced, distributed, or transmitted in any form without prior written permission.