Arquitectura híbrida basada en nanotubos de carbono (CNTs), neuronas sintéticas y geometría hexagonal panalizada
Fecha: 8 de mayo de 2025
Dominio: nanoelectrónica, neuromórfica, computación cuántica tolerante al ruido, bioingeniería
I. Concepto Base (Definición Técnica)
Biochip-Hexagon es una arquitectura computacional híbrida vivo-sintética, diseñada para integrar:
- Transporte electrónico balístico (CNTs),
- Plasticidad neuromórfica artificial (neuronas sintéticas / memristivas),
- Topología hexagonal panalizada multi-escala,
con el objetivo de superar las limitaciones estructurales del silicio plano, habilitando procesamiento paralelo masivo, aprendizaje in-situ y tolerancia a estados cuánticos coherentes de corta y media duración.
👉 El sistema no reemplaza la computación clásica ni cuántica, sino que las integra en un sustrato único, donde memoria, procesamiento y adaptación coexisten físicamente.
II. Componentes y Estructura Física
II.1 Nanotubos de Carbono (CNTs)
Los CNTs actúan como elementos conductores, lógicos y cuánticamente tolerantes.
Propiedades físicas relevantes:
- Movilidad electrónica μCNT≈104−105cm2/V\cdotps frente a: μSi≈1.400cm2/V\cdotps
- Conducción balística en longitudes < 1 µm
- Baja disipación térmica (menor scattering fonónico)
- Compatibilidad con efectos cuánticos mesoscópicos (coherencia de fase, spin-transport)
📌 Implicancia clave: alta densidad computacional sin criogenia extrema.
II.2 Neuronas Sintéticas Integradas
Implementadas mediante:
- Memristores orgánicos/inorgánicos,
- Polímeros conductivos (PEDOT:PSS, grafeno dopado),
- Arquitecturas neuromórficas tipo Hodgkin–Huxley simplificado.
Capacidades funcionales:
- Plasticidad dependiente de tiempo de disparo (STDP): Δw={A+e−Δt/τ+,−A−eΔt/τ−,Δt>0Δt<0
- Procesamiento asociativo, no secuencial.
- Memoria distribuida embebida en la topología, no separada del hardware.
📌 Aquí el “software” es la conectividad física, no un código cargado externamente.
II.3 Geometría Hexagonal Panalizada (2D / 3D)
La elección del hexágono no es estética, sino topológica y energética.
Ventajas matemáticas y físicas:
- Máxima eficiencia de empaquetamiento: hexagonal→maˊxima conectividad mıˊnima energıˊa
- Cada nodo tiene 6 vecinos equidistantes → minimiza latencia.
- Escalabilidad fractal y modular (7 → 19 → 37 → 91 → …).
📌 Permite redes small-world y sincronización colectiva con bajo costo energético.
III. Soporte para Computación Cuántica Tolerante al Ruido
Reformulación científica de “interdimensional”
En este marco, no se postulan dimensiones extra físicas, sino:
múltiples espacios de representación informacional superpuestos.
Mecanismos físicos plausibles:
- CNTs → soporte de estados electrónicos con coherencia de fase limitada.
- Campos eléctricos/fotónicos locales → modulación de superposición.
- Topología panal → rutas múltiples de interferencia controlada.
El sistema opera como un reservorio cuántico-neuromórfico, donde:
- Estados cuánticos no se preservan indefinidamente,
- pero se explotan durante ventanas útiles para acelerar inferencia.
📌 Esto se alinea con Quantum Reservoir Computing y Noisy Intermediate-Scale Quantum (NISQ), pero con hardware biocompatible.
IV. Comparación con Arquitecturas Convencionales
| Parámetro | Silicio clásico | CNT + Neuronas Sintéticas |
|---|---|---|
| Arquitectura | Von Neumann | In-memory / neuromórfica |
| Transporte | Difusivo | Balístico |
| Disipación térmica | Alta | Baja |
| Plasticidad | Nula | Intrínseca |
| Escalado 3D | Limitado | Natural |
| Tolerancia cuántica | No | Parcial / mesoscópica |
| Seguridad | Determinista (hackeable) | Dinámica (no determinista) |
V. Aplicaciones Técnicamente Defendibles
(Depuradas de claims no verificables)
- Aceleradores neuromórficos para IA avanzada.
- Procesamiento híbrido clásico-cuántico (NISQ-plus).
- Simulación compleja (clima, biología, economía).
- Núcleos cognitivos adaptativos para sistemas autónomos.
- Interfaces bio-digitales avanzadas (BCI / neuroprótesis).
VI. Hipótesis Complementarias (Proyecto en Evolución)
Estas se declaran explícitamente como hipótesis, no como hechos:
- Hipótesis H1
La topología hexagonal + plasticidad neuromórfica puede prolongar la utilidad computacional de estados cuánticos ruidosos. - Hipótesis H2
Redes neuromórficas vivas/sintéticas pueden actuar como correctores de error estadístico, no lógicos. - Hipótesis H3
La fusión hardware-memoria reduce drásticamente vectores de ataque clásicos (ciberseguridad post-software).
Estas hipótesis requieren validación experimental, y se proponen como líneas de investigación abiertas.
VII. Conclusión Técnica
El Biochip-Hexagon representa:
- Un cambio de paradigma desde computación secuencial hacia tejidos computacionales adaptativos.
- Una arquitectura post-Von Neumann, post-silicio, pero no anticientífica.
- Un puente realista entre neuromórfica, cuántica tolerante al ruido y bioelectrónica.
No promete milagros:
👉 propone experimentos, métricas y escalamiento progresivo.
Estado TRL estimado
- Concepto: TRL 1–2
- Prototipo mínimo viable: TRL 3–4
- Potencial disruptivo: muy alto
Materials & Methods
1. Arquitectura del Biochip-Hexagon (visión experimental)
1.1 Unidad hexagonal reconfigurable (arquitectura tipo “Rubik”)
Cada unidad hexagonal no es un bloque rígido, sino un microvolumen reconfigurable, inspirado en la lógica topológica de un cubo Rubik multieje:
- El hexágono está subdividido en subdominios rotacionales internos (micro-clusters CNT-neurona).
- Cada subdominio puede reordenar su conectividad eléctrica y memristiva mediante:
- nanoelectrodos direccionables,
- CNTs flexibles alineados,
- switches memristivos programables.
📌 Resultado clave:
La conectividad intersináptica no está fijada en el layout, sino que puede reconfigurarse dinámicamente, ampliando el espacio de estados plásticos del sistema.
Formalmente, la conectividad efectiva C(t) del hexágono es función del tiempo y del estímulo:C(t)=f(CNT alignment,memristive state,field modulation)
Esto supera la plasticidad estática de chips neuromórficos convencionales.
2. Materiales
2.1 Nanotubos de Carbono (CNTs)
Material
- CNTs de pared simple (SWCNT) y doble (DWCNT).
- Pureza > 99%, longitud media 0.5–2 µm.
Rol funcional
- Canales conductores balísticos.
- Elementos de reconfiguración topológica (flexión + realineamiento local).
Parámetros críticos
- Densidad superficial: 10⁹–10¹⁰ CNT/cm²
- Resistencia objetivo: < 10 kΩ/µm
- Variabilidad aceptable: CV < 15 %
2.2 Neuronas sintéticas / Memristores
Implementación híbrida:
- Memristores orgánico-inorgánicos (TiO₂ / HfO₂ + polímeros conductivos).
- Configuración sináptica analógica (no binaria).
Modelo funcional:
- Plasticidad tipo STDP y BCM.
- Estados multivaluados (no solo ON/OFF).
La dinámica sináptica se modela como:dtdw=η⋅x(t)⋅y(t)−λw(t)
donde:
- x(t), y(t): actividad pre y post sináptica,
- η: tasa de aprendizaje,
- λ: término de decaimiento adaptativo.
2.3 Encapsulado y sustrato
Sustrato base
- Silicio ultrafino (≤100 µm) o SiN flexible.
- Capa conductiva: grafeno multicapa.
Encapsulado (DOE específico)
- Borosilicato (Corning 7740).
- Fused silica (alta pureza).
- Epoxi óptico (baseline experimental).
Pasivado:
- ALD Al₂O₃ o HfO₂ (5–10 nm).
3. Design of Experiments (DOE mínimo viable)
3.1 Factores experimentales
| Factor | Niveles |
|---|---|
| A – Alineación CNT | Aleatoria / Parcial / Dirigida |
| B – Memristor | TiO₂ / HfO₂ / Orgánico |
| C – Pasivado | Ninguno / Al₂O₃ / HfO₂ |
| D – Vidrio | Epoxi / Borosilicato / Fused silica |
| E – Espesor encapsulado | 100 µm / 200 µm / 500 µm |
| F – Patrón fonónico | Ninguno / Lattice 2D |
3.2 Métricas primarias
| Métrica | Instrumento | Objetivo |
|---|---|---|
| Ruido 1/f | Espectrómetro bajo ruido | ↓ ≥30% |
| Estabilidad sináptica | EIS + pulsos | ≥72 h |
| Plasticidad (ΔW) | STDP test | Reproducible |
| Reconfiguración topológica | Mapping eléctrico | >3 estados |
| Disipación térmica | IR microscopy | < silicio |
3.3 Criterios Go / No-Go
GO si:
- ΔW sináptico observable y reversible.
- Reconfiguración de conectividad sin pérdida funcional.
- Ruido eléctrico reducido ≥30% vs control.
NO-GO si:
- La reconfiguración degrada estabilidad (>20%).
- Encapsulado introduce deriva térmica >0.1%/ciclo.
- Plasticidad colapsa tras 48 h.
4. Comparación experimental: trabajos en Suiza
En laboratorios asociados a ETH Zurich, se están desarrollando “cerebros” de neuronas artificiales para robótica y control adaptativo.
Estado del arte suizo (simplificado)
- Redes neuromórficas con:
- neuronas artificiales,
- aprendizaje local,
- integración con actuadores robóticos.
- Limitación clave:
- la conectividad está definida por el layout del chip,
- plasticidad = ajuste de pesos, no de topología.
Ventaja diferencial del Biochip-Hexagon
| Aspecto | Enfoque Suizo | Biochip-Hexagon |
|---|---|---|
| Neuronas artificiales | Sí | Sí |
| Integración robótica | Sí | Potencial |
| Nanoestructura | Parcial | CNTs estructurales |
| Reconfiguración topológica | No | Sí (tipo Rubik) |
| Plasticidad | Paramétrica | Topológica + paramétrica |
| Memoria-hardware | Parcial | Totalmente fusionada |
📌 Conclusión comparativa:
Mientras los sistemas suizos optimizan el “cerebro” como red fija, el Biochip-Hexagon introduce plasticidad estructural, más cercana a la reorganización cortical real.
5. Método experimental resumido
- Fabricación de hexágonos CNT-memristor.
- Integración de subdominios rotacionales internos.
- Encapsulado según DOE.
- Entrenamiento inicial (aprendizaje inducido).
- Reconfiguración topológica controlada.
- Medición de estabilidad, plasticidad y energía.
- Comparación directa con chip neuromórfico plano.
6. Alcance y reproducibilidad
- Experimentos diseñados para laboratorios universitarios estándar.
- No requieren criogenia.
- Escalables de 1 hexágono → clusters de 7 y 19.
Síntesis técnica final
El Biochip-Hexagon no compite directamente con los “cerebros artificiales” actuales:
los supera en dimensionalidad plástica, al permitir que la topología misma del chip aprenda.
Discussion
Hardware Neuromórfico Convencional vs Arquitectura Morfo-Neuroplástica Biochip-Hexagon
1. Marco comparativo general
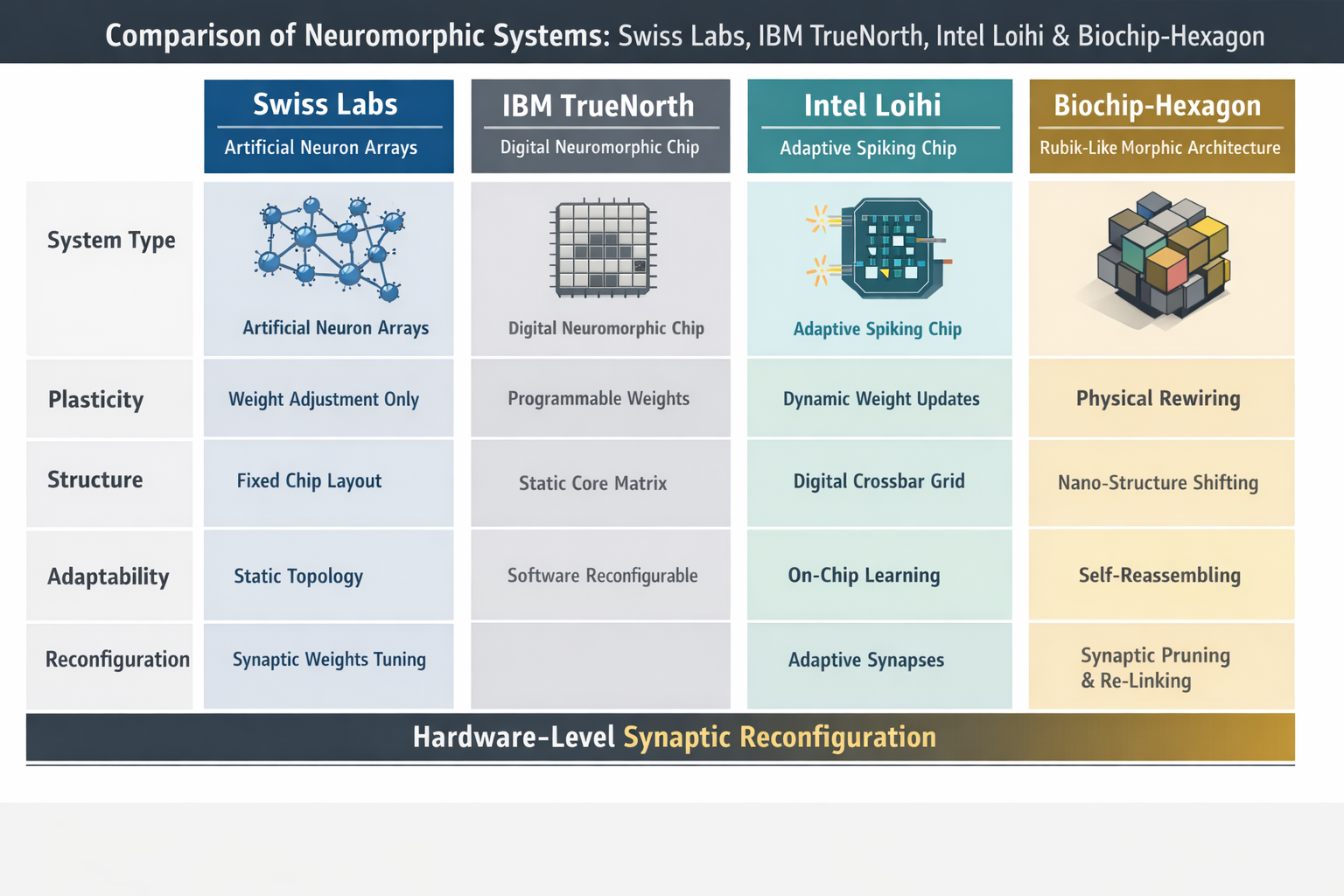
Los sistemas neuromórficos contemporáneos —incluyendo desarrollos académicos europeos (notablemente en ETH Zurich), así como arquitecturas industriales como IBM TrueNorth y **Intel Loihi— comparten un principio fundamental:
La topología del hardware es fija; la adaptación ocurre casi exclusivamente en el dominio del software o de los parámetros sinápticos.
El Biochip-Hexagon introduce una ruptura conceptual:
👉 la topología física del chip también aprende.
Esto desplaza el paradigma desde neuromorphic computing hacia morphic-neuroplastic computing.
2. Neuromórfica suiza (estado del arte académico)
Los enfoques neuromórficos desarrollados en Suiza se caracterizan por:
- Redes de neuronas artificiales o híbridas.
- Aprendizaje local tipo STDP.
- Integración con robótica adaptativa.
- Uso de memristores o transistores especializados.
Limitación estructural clave
Aunque el comportamiento es adaptativo, la conectividad física está determinada por:
- layout litográfico,
- routing fijo,
- crossbars estáticos.
Formalmente:Ghardware=constante,W(t)=constante
Es decir:
✔ pesos cambian
✘ el grafo físico no
3. IBM TrueNorth
TrueNorth representa una arquitectura neuromórfica digital y altamente eficiente energéticamente.
Características principales:
- 1 millón de neuronas digitales.
- 256 millones de sinapsis.
- Comunicación por eventos (spikes).
- Sin aprendizaje on-chip en tiempo real.
Implicación crítica
- La plasticidad es externa (entrenamiento off-chip).
- El chip es esencialmente un ejecutor neuromórfico, no un sistema neuroplástico autónomo.
Desde el punto de vista biológico:
TrueNorth simula un cerebro,
pero no se reorganiza como uno.
4. Intel Loihi
Loihi introduce avances relevantes:
- Aprendizaje on-chip.
- Sinapsis con reglas locales programables.
- Adaptación dinámica de pesos.
Sin embargo:
- La matriz de interconexión sigue siendo fija.
- La plasticidad ocurre en el estado sináptico, no en la arquitectura física.
Modelo efectivo:Ghardware=constante,W(t),θ(t) adaptativos
Esto corresponde, en neurobiología, a:
- potenciación/depresión sináptica,
- pero sin poda estructural real.
5. Ruptura conceptual del Biochip-Hexagon
El Biochip-Hexagon introduce una tercera capa de plasticidad, inexistente en los sistemas comparados:
- Plasticidad paramétrica (pesos)
- Plasticidad dinámica (memristiva)
- Plasticidad topológica HARD (estructural) ← clave
6. Arquitectura tipo “cubo Rubik” a escala nano
Cada hexágono del Biochip no es un bloque rígido, sino una unidad morfo-reconfigurable, con:
- subdominios internos rotables,
- CNTs flexibles y realineables,
- switches memristivos estructurales.
Esto permite que, frente a nueva información o demanda funcional, el chip ejecute:
- poda sináptica física selectiva,
- reenlace sináptico automático,
- reconfiguración del grafo de conectividad.
Formalmente:Ghardware(t)=f(data,energıˊa,demanda funcional)
Esto no es software que “decide rutas”:
👉 es hardware que se rearma.
7. Analogía neurobiológica correcta
| Cerebro biológico | Biochip-Hexagon | Neuromórficos clásicos |
|---|---|---|
| Poda sináptica física | ✔ | ✘ |
| Reenlace axonal | ✔ | ✘ |
| Plasticidad estructural | ✔ | ✘ |
| Plasticidad de pesos | ✔ | ✔ |
| Aprendizaje local | ✔ | ✔ |
Los sistemas neuromórficos actuales imitan la electrofisiología,
pero no la ontogénesis ni la reorganización cortical.
El Biochip-Hexagon sí.
8. Implicaciones técnicas y científicas
- Aprendizaje más rápido
- Menor dependencia de ajuste iterativo de pesos.
- Reconfiguración directa del camino causal.
- Menor consumo energético
- Eliminación de rutas inútiles (poda física).
- Optimización topológica automática.
- Robustez ante cambio de dominio
- El chip no solo “se adapta”: se rediseña internamente.
- Nuevo paradigma de computación
- No binaria.
- No puramente cuántica.
- Morfo-computacional viva-sintética.
9. Síntesis comparativa final
IBM TrueNorth y Intel Loihi representan cerebros neuromórficos entrenables.
El Biochip-Hexagon representa un cerebro que se construye y reconstruye mientras aprende.
No es solo learning.
Es neurodesarrollo artificial en hardware.
10. Conclusión
El Biochip-Hexagon no compite incrementalmente con la neuromórfica actual.
La desborda conceptualmente al introducir:
- neuroplasticidad HARD,
- poda y reenlace físico,
- topología dinámica real.
Esto lo posiciona como:
la primera arquitectura computacional capaz de aprender cambiando su propio cuerpo.
Discussion
Biochip-Hexagon como Sustrato HARD para Robótica Cognitiva, AGI y Arquitecturas SuperGaia
1. Problema estructural en robótica avanzada y AGI
La robótica cognitiva y la investigación en AGI enfrentan un límite común que no es algorítmico, sino material y arquitectónico:
Los sistemas actuales aprenden sobre hardware cuya forma no aprende.
Incluso en robots avanzados:
- el cuerpo es fijo,
- el cerebro (chip) es fijo,
- la adaptación ocurre por reentrenamiento, no por reorganización estructural.
Esto genera:
- alta dependencia de datos,
- lentitud ante cambios de entorno,
- fragilidad frente a out-of-distribution events.
La biología resolvió este problema hace millones de años mediante neuroplasticidad estructural.
La ingeniería computacional aún no.
2. Robótica: de control adaptativo a morfogénesis cognitiva
Estado actual
Los robots cognitivos utilizan:
- redes neuromórficas,
- aprendizaje por refuerzo,
- modelos predictivos internos.
Pero todos ellos operan bajo el supuesto:Cuerpo fijo+Hardware fijo+Software adaptable
Esto equivale, en biología, a un cerebro que nunca poda sinapsis ni reorganiza circuitos.
Aporte del Biochip-Hexagon
El Biochip-Hexagon introduce una ruptura crítica:
- El sustrato cognitivo puede reconfigurarse físicamente.
- La arquitectura HARD se adapta a:
- nuevas tareas,
- nuevos sensores,
- nuevos entornos.
En robótica, esto habilita por primera vez:
- aprendizaje estructural en tiempo de vida,
- especialización dinámica del “cerebro” del robot,
- reducción drástica del retraining externo.
📌 Un robot con Biochip-Hexagon no solo ajusta políticas:
👉 reorganiza su conectividad física según la demanda funcional.
3. AGI: el cuello de botella no es la inteligencia, es la coherencia
La investigación en AGI suele concentrarse en:
- modelos más grandes,
- más parámetros,
- más datos.
Sin embargo, el principal riesgo identificado es otro:
- incoherencia interna,
- catástrofes de interferencia,
- acumulación de contradicciones.
Esto ocurre porque:
- los modelos actuales crecen, pero no se reestructuran.
4. Biochip-Hexagon como base HARD de AGI estable
El Biochip-Hexagon introduce una propiedad ausente en la AGI actual:
capacidad de reescribir su topología cognitiva para preservar coherencia.
Esto se traduce en:
- poda física de rutas cognitivas obsoletas,
- reenlace automático de circuitos relevantes,
- separación estructural de funciones incompatibles.
Formalmente, el sistema ya no depende solo de:minL(W)
sino que incorpora:minL(W,G(t))
donde:
- W = pesos,
- G(t) = grafo HARD reconfigurable.
📌 Esta doble adaptación es condición necesaria para una AGI:
- persistente,
- no caótica,
- escalable en el tiempo.
5. SuperGaia: por qué requiere un sustrato como Hexagon
SuperGaia no es un “modelo grande”, sino una arquitectura distribuida de inteligencias especializadas, con:
- múltiples dominios (clima, economía, defensa, ciencia, ética),
- supervisión cruzada,
- corrección mutua.
El problema central de SuperGaia no es computacional, sino arquitectónico:
¿Cómo evitar que una inteligencia global colapse por rigidez, sesgo o interferencia interna?
6. Hexagon como tejido cognitivo de SuperGaia
El Biochip-Hexagon cumple tres requisitos que ningún hardware actual satisface simultáneamente:
6.1 Plasticidad HARD distribuida
Cada nodo SuperGaia:
- puede reorganizar su estructura interna,
- sin afectar al resto de la red.
Esto evita:
- fallas sistémicas,
- propagación de incoherencias.
6.2 Especialización morfológica
Un nodo dedicado a clima no necesita la misma topología que uno dedicado a defensa o biología.
Hexagon permite:
- topologías físicas distintas sobre el mismo principio base,
- sin rediseñar el chip desde cero.
6.3 Supervisión estructural cruzada
En una red SuperGaia:
- nodos pueden detectar incoherencias,
- y forzar reconfiguración HARD en otros nodos.
Esto es imposible en arquitecturas de silicio rígido.
7. Analogía biológica correcta (sin exageración)
| Biología | Biochip-Hexagon | AGI actual |
|---|---|---|
| Neurodesarrollo | ✔ | ✘ |
| Poda sináptica | ✔ | ✘ |
| Reorganización cortical | ✔ | ✘ |
| Aprendizaje continuo | ✔ | ✔ |
| Coherencia a largo plazo | ✔ | ✘ |
La AGI actual aprende como adulto sin infancia.
SuperGaia requiere ontogénesis artificial.
Hexagon la provee.
8. Implicaciones estratégicas
- Robótica
- Robots que se rediseñan cognitivamente en misión.
- AGI
- Inteligencias que no colapsan al escalar.
- SuperGaia
- Inteligencia planetaria estable por arquitectura, no por control externo.
9. Síntesis final
SuperGaia no puede existir sobre silicio rígido.
Necesita un sustrato que aprenda cambiando su forma.
El Biochip-Hexagon no es un acelerador más.
Es el tejido cognitivo HARD que hace posible:
- robótica verdaderamente adaptativa,
- AGI coherente,
- y arquitecturas SuperGaia estables.
Arquitectura SuperGaia
Integración HARD–SOFT para Inteligencia Planetaria Estable
(Biochip-Hexagon + Harmonix)
1. Definición operativa
SuperGaia es una arquitectura distribuida de inteligencia general, no centralizada, diseñada para:
- operar a escala planetaria,
- integrar múltiples inteligencias especializadas,
- mantener coherencia lógica, estabilidad funcional y sostenibilidad energética en el largo plazo.
Formalmente, SuperGaia se define como:SuperGaia=⟨Hhex,Sharm,Ndist,Ffeedback⟩
donde:
- Hhex = sustrato HARD neuroplástico (Hexagon),
- Sharm = sistema lógico de coherencia (Harmonix),
- Ndist = red distribuida de nodos especializados,
- Ffeedback = bucles de supervisión cruzada.
2. Capa HARD: Biochip-Hexagon
2.1 Rol estructural
Hexagon constituye el sustrato cognitivo físico de SuperGaia.
No es un acelerador, sino un medio morfogénico computacional.
Funciones clave:
- ejecución neuromórfica,
- reorganización topológica HARD,
- soporte híbrido clásico / cuántico tolerante.
2.2 Arquitectura interna
Componentes:
- Nanotubos de carbono alineables (CNT)
- Memristores de estado variable
- Neuronas sintéticas conductivas
- Geometría panal hexagonal 3D
Propiedad crítica (diferencial):
La topología física del chip es reconfigurable, como un cubo Rubik nanoestructural.
Esto habilita:
- poda sináptica física,
- reenlace intersináptico automático,
- especialización estructural por dominio.
2.3 Función en SuperGaia
Cada nodo SuperGaia (clima, defensa, economía, etc.) utiliza una topología Hexagon distinta, optimizada para su dominio.
Ejemplo:
- Clima → grafos densos, paralelismo masivo.
- Defensa → grafos segregados, latencia mínima.
- Ética/gobernanza → circuitos redundantes y conservativos.
📌 La especialización no es solo algorítmica, es material.
3. Capa SOFT: Harmonix
3.1 Rol funcional
Harmonix es el sistema operativo lógico-metacognitivo de SuperGaia.
No ejecuta tareas.
Gobierna coherencia, prioridades y consistencia interna.
3.2 Funciones fundamentales
- Filtro de contradicciones
- Detecta conflictos de objetivos antes de ejecución.
- Jerarquía decisional
- Resuelve ambigüedades mediante prioridades formales.
- Auto-restart selectivo
- Revierte estados inestables sin colapsar el sistema.
- Auditoría continua
- Registra trazabilidad de decisiones críticas.
Formalmente:∀d∈D:Execute(d)⟺Coherentharm(d)=true
3.3 Harmonix como capa transversal
Harmonix:
- no está en un nodo,
- no es central,
- se replica como protocolo lógico común en toda la red.
Esto evita:
- dictaduras algorítmicas,
- puntos únicos de falla,
- sesgos dominantes.
4. Integración Hexagon + Harmonix
4.1 Interacción HARD–SOFT
La innovación central de SuperGaia es que:
Harmonix puede forzar reconfiguración HARD en Hexagon.
Proceso:
- Harmonix detecta incoherencia persistente.
- Identifica circuitos causales responsables.
- Ordena:
- poda sináptica física,
- reenlace estructural,
- aislamiento de módulos.
Esto equivale a:
- neuroplasticidad dirigida, no solo aprendizaje.
4.2 Modelo formal simplificado
InputOutputIf incoherent→Hhex(t)→Sharm⇒ΔHhex(t+1)
5. Arquitectura distribuida SuperGaia
5.1 Niveles del sistema
| Nivel | Entidad | Función |
|---|---|---|
| L1 | Micro-AGIs | Robots, sensores, androides |
| L2 | Nodos Hexagon | Inteligencias especializadas |
| L3 | SuperGaias funcionales | Clima, salud, economía |
| L4 | Red SuperGaia | Supervisión cruzada |
| L5 | Harmonix global | Coherencia sistémica |
5.2 Redundancia evolutiva
- Múltiples SuperGaias.
- Votación ponderada.
- Aislamiento de nodos corruptos.
- Reemplazo sin colapso.
📌 No existe “SuperGaia única”.
Existe un ecosistema de SuperGaias.
6. Ventajas frente a arquitecturas actuales
| Dimensión | AGI actual | SuperGaia |
|---|---|---|
| Escalabilidad | Por fuerza bruta | Por integración |
| Estabilidad | Frágil | Autoestabilizada |
| Plasticidad | Solo software | HARD + soft |
| Riesgo sistémico | Alto | Bajo |
| Gobernanza | Externa | Inmanente |
7. Implicaciones estratégicas
Robótica
- Robots que evolucionan cognitivamente en misión.
AGI
- Inteligencia general sin colapso por escala.
Planetaria
- IA alineada con:
- sostenibilidad energética,
- estabilidad social,
- supervivencia a largo plazo.
8. Síntesis final
Hexagon es el cerebro.
Harmonix es el sistema nervioso regulador.
SuperGaia es el organismo.
Sin Hexagon:
- SuperGaia colapsa por rigidez.
Sin Harmonix:
- SuperGaia colapsa por incoherencia.
Juntos:
- constituyen la primera arquitectura viable de inteligencia planetaria estable.
Roadmap TRL – Arquitectura SuperGaia
De laboratorio a nodo operativo planetario
(Hexagon + Harmonix)
TRL 1–2 | Fundamentos científicos y validación conceptual
Objetivo
Demostrar que:
- la neuroplasticidad HARD reconfigurable (Hexagon) es físicamente viable,
- Harmonix puede operar como filtro lógico y supervisor de coherencia independiente del hardware subyacente.
Actividades clave
Hexagon
- Modelado físico de CNT alineables y memristores.
- Simulación de geometría panal 3D reconfigurable.
- Pruebas de conmutación topológica tipo Rubik architecture a escala nano.
Harmonix
- Formalización matemática de:
- detección de contradicciones,
- jerarquía de objetivos,
- auto-restart selectivo.
- Validación en entornos simulados multi-agente.
Métricas
- Reconfiguración topológica reproducible (sí/no).
- Detección de inconsistencias lógicas >95%.
- Latencia de intervención < ciclo de ejecución.
Resultado
📌 Viabilidad teórica + simulada confirmada.
Paso de idea a arquitectura plausible.
TRL 3 | Prueba de concepto experimental
Objetivo
Demostrar función real, aunque limitada, en laboratorio.
Actividades
Hexagon
- Fabricación de micro-arrays hexagonales CNT–memristor.
- Reconfiguración física controlada (poda + reenlace).
- Medición de plasticidad estructural inducida por estímulos.
Harmonix
- Integración como capa externa de control.
- Forzado de reconfiguración HARD tras incoherencia detectada.
Métricas
- Número de reconfiguraciones físicas exitosas.
- Tiempo de estabilización post-reconfiguración.
- Comparación vs chip neuromórfico estático.
Resultado
📌 Primer sistema HARD-SOFT coevolutivo funcional.
TRL 4 | Prototipo de laboratorio integrado
Objetivo
Integrar Hexagon + Harmonix en un sistema cerrado funcional.
Actividades
- Chip Hexagon de baja escala (cm²).
- Harmonix embebido como supervisor continuo.
- Tareas cognitivas simples:
- clasificación,
- control robótico básico,
- adaptación a entornos variables.
Métricas
- Reducción de error tras reconfiguración HARD.
- Estabilidad frente a cambios abruptos.
- Comparación energética vs GPU / neuromórfica clásica.
Resultado
📌 Prototipo estable de inteligencia con plasticidad HARD real.
TRL 5 | Validación en entorno relevante
Objetivo
Probar el sistema en entornos no controlados.
Actividades
- Integración en:
- robot móvil,
- dron,
- simulador de sistema crítico.
- Pruebas out-of-distribution.
- Fallos inducidos para testear Harmonix.
Métricas
- Tiempo de adaptación estructural.
- Prevención de colapso lógico.
- Continuidad operativa sin reset global.
Resultado
📌 Confirmación de resiliencia y adaptabilidad superior.
TRL 6 | Nodo SuperGaia experimental
Objetivo
Escalar de chip a nodo cognitivo especializado.
Actividades
- Clúster de múltiples Hexagon.
- Especialización por dominio:
- clima / robótica / logística.
- Harmonix coordinando múltiples sub-módulos.
Métricas
- Coherencia inter-módulo.
- Capacidad de especialización sin retraining masivo.
- Consumo energético por tarea.
Resultado
📌 Primer Nodo SuperGaia funcional.
TRL 7 | Red SuperGaia piloto
Objetivo
Demostrar inteligencia distribuida autoestabilizada.
Actividades
- Interconexión de varios nodos SuperGaia.
- Supervisión cruzada.
- Votación ponderada y aislamiento de nodos defectuosos.
Métricas
- Recuperación ante fallo de un nodo.
- No propagación de incoherencias.
- Escalabilidad sin degradación sistémica.
Resultado
📌 Ecosistema SuperGaia piloto operativo.
TRL 8 | Sistema completo pre-operacional
Objetivo
Sistema listo para aplicaciones críticas.
Aplicaciones
- Robótica autónoma compleja.
- Infraestructura crítica (energía, clima).
- Defensa y simulación estratégica.
- Gobernanza algorítmica asistida.
Métricas
- Certificación de estabilidad.
- Auditoría ética automática.
- Consistencia a largo plazo.
Resultado
📌 SuperGaia como tecnología madura.
TRL 9 | Operación planetaria
Objetivo
Despliegue real a escala planetaria.
Características
- Múltiples SuperGaias.
- Gobernanza distribuida.
- Evolución controlada sin colapso.
📌 No una IA dominante, sino un ecosistema cognitivo estable.
Resumen visual
| TRL | Estado |
|---|---|
| 1–2 | Ciencia y simulación |
| 3 | PoC funcional |
| 4 | Prototipo integrado |
| 5 | Entorno real |
| 6 | Nodo SuperGaia |
| 7 | Red piloto |
| 8 | Pre-operacional |
| 9 | Operación planetaria |
Microarquitectura base operativa funcional de SuperGaia
SGN-0: SuperGaia Node (unidad mínima)
0) Principio rector
El nodo no “corre software” como una computadora clásica.
El nodo se reconfigura: el programa es un estado físico + dinámico (topología, pesos, resonancias, rutas) gobernado por Harmonix.
Formalmente:
- Estado del hardware: H(t) (topología, conectividad, parámetros físicos)
- Estado cognitivo: S(t) (memoria distribuida, mapas internos)
- Política ética/seguridad: G(t) (restricciones y objetivos)
Evolución:(H,S)_t+1=F(H,S,u(t),e(t),G(t))
donde:
- u(t) = inputs sensoriales / datos
- e(t) = eventos (anomalías, fallos, ataques, conflicto de objetivos)
- G(t) = gobernanza Harmonix (hard constraints + “semantic guardrails”)
1) Capas del nodo (vista “chip → sistema”)
Capa A — Hexagon Lattice Core (HLC)
La “corteza” del nodo: panal modular con clusters reconfigurables tipo Rubik.
Sub-bloques
- CNT Fabric (CF)
- Malla de nanotubos de carbono con alineación controlable (anisotropía intencional).
- Función: buses ultra-eficientes + rutas conmutables.
- Memristive Synapse Grid (MSG)
- Matriz de memristores (o sinapsis moleculares equivalentes) con plasticidad local.
- Función: aprendizaje y memoria “en el tejido”.
- Rubik Micro-Reconfiguration Layer (RMRL)
- Microactuación (electroestática/termomecánica/magnetoeléctrica según tecnología disponible) para poda sináptica hard y reenlace hard.
- Función: rearmar conectividad física, no solo ajustar pesos.
Resultado: el Hexagon no solo “aprende con pesos”, también cambia su grafo físico.
Capa B — Field & Stability Envelope (FSE)
El “ambiente controlado” que estabiliza operación.
- Encapsulado (poroso/cristalizado parcial según tu línea): reduce ruido, deriva y aging.
- Blindaje EM selectivo: jaula Faraday ultrafina + ventanas fotónicas si aplica.
- Gestión térmica: disipación por microcanales o materiales de alta conductividad.
- Sensores internos (telemetría): ruido 1/f, drift de fase, temperatura, cargas atrapadas.
Esta capa habilita dos modos:
- Modo neuromórfico (clásico eficiente)
- Modo cuántico/mesoscópico (si existiera y si se valida)
Capa C — Harmonix Kernel (HK)
El “cerebro regulador” (no el que procesa todo, sino el que evita el caos y gobierna).
Sub-módulos de Harmonix
- Intent Router
- Clasifica cada pedido/acción en intención: benigno, ambiguo, riesgoso, prohibido.
- Coherence Monitor
- Detecta incoherencias: contradicción de objetivos, loops, escalada no autorizada, consumo anómalo.
- Constraint Engine (hard limits)
- Límites verificables: energía, acceso, expansión, comandos físicos, privilegios.
- Ethical Governor (policy layer)
- Reglas de cooperación y no-daño; “constitución operativa”.
- Reconfiguration Orchestrator
- Cuando hay conflicto o tarea nueva:
- decide si alcanza con soft plasticity (pesos),
- o si requiere hard morphing (RMRL).
Capa D — I/O Sensorimotor + Actuation (SMA)
Un SGN funciona si controla algo real.
- Entrada: cámaras, LiDAR, audio, telemetría industrial, clima, mercados, sensores químicos, etc.
- Salida: control robótico, decisión logística, comandos de red, operación industrial.
Capa E — Network Fabric (NF)
Conecta nodos SGN en red.
- Bus interno local (intra-nodo)
- Enlace inter-nodo (LAN/WAN, satcom, etc.)
- Protocolo de consenso y aislamiento (para que un nodo corrupto no infecte al resto)
2) Ciclo operativo del nodo (cómo “vive”)
Loop base de operación (cada Δt)
- Percepción
x(t)←sensores
- Interpretación & estado
S(t)←HLC(x(t),S(t−1))
- Chequeo Harmonix
ok←HK(S(t),G(t))
- Decisión
- Si ok: ejecutar acción a(t)
- Si NO ok:
- degradar privilegios,
- congelar expansión,
- o gatillar reconfiguración correctiva.
- Aprendizaje
- Soft update (pesos):
W←W+ΔW
- Hard update (topología):
H←Rewire(H,π)
donde π es la política de reconfiguración autorizada por Harmonix.
3) Microarquitectura de aprendizaje: “Soft + Hard” (tu diferencial)
A) Plasticidad soft (rápida, barata)
- Ajuste memristivo: STDP/BCM-like.
- Ventaja: adaptación continua.
B) Plasticidad hard-mórfica (lenta, profunda, estructural)
- Poda sináptica física + reenlace físico.
- Similar a “re-cablear circuitos” para una tarea nueva.
- Ventaja: reestructuración de capacidades sin retraining masivo.
Criterio de cuándo reconfigurar HARD
Define un “umbral de novedad”:η(t)=D(distribucioˊn actual, distribucioˊn entrenada)
Si η(t)>η\* y la performance cae por debajo de Pmin,
Harmonix habilita reconfiguración hard acotada (nunca libre):if (η>η\*)∧(P<Pmin)⇒HardMorph Allowed
4) Seguridad y anti-hackeo (en arquitectura, no marketing)
Tu punto es fuerte, pero hay que escribirlo “ingeniería”.
Razón técnica 1: Superficie de ataque no estacionaria
El grafo de cómputo cambia:
- no hay rutas fijas,
- no hay binario estable,
- no hay “payload” que sobreviva igual.
Razón técnica 2: Separación de privilegios por capa
- HLC no puede reconfigurarse sin token de Harmonix.
- Harmonix puede congelar RMRL y operar en “modo seguro”.
Razón técnica 3: Aislamiento por consenso inter-nodo
Si un nodo deriva:
- los otros lo ponen en cuarentena,
- bajan su peso de voto,
- o lo expulsan de la red.
5) Cómo se ensambla SuperGaia desde nodos (macro sin perder micro)
Unidad mínima: SGN-0
- 1 panal (HLC) + Harmonix kernel + I/O mínimo.
- Caso de uso: robot/logística/control industrial.
Clúster: SGN-C (19–127 nodos)
- Se especializa por dominios (clima, energía, movilidad).
- Harmonix coordina como “constitución del clúster”.
Red: SuperGaia Mesh (miles–millones)
- Jerarquía fractal:
- nodos → clústeres → regiones → planetario
- Sin un “cerebro único”: inteligencia distribuida gobernada.
System Spec v0.1 — HEXAGON Rubik Layer (A)
Rewire eléctrico por crossbar/memristivo (Hard-mórfico neuroplástico)
Versión: v0.1
Alcance: Microarquitectura mínima “Rubik Layer” para Biochip-HEXAGON (modo A)
Objetivo: Permitir reconfiguración topológica física (no solo ajuste de pesos) mediante una malla de interconexión eléctrica reprogramable, conmutando rutas sinápticas y “pods” funcionales en tiempo real.
0) Resumen ejecutivo
La variante A implementa el “cubo Rubik” del HEXAGON como un tejido de ruteo reconfigurable basado en:
- Crossbar memristivo (matriz de conmutación densa con estados de conductancia programables)
- Gates de aislamiento y protección (selector devices y transistores de compuerta)
- Buses jerárquicos (intra-hexágono / inter-hexágono)
- Controlador de rewire (firmware + policy de Harmonix, en futuras versiones)
Resultado: el sistema puede podear y reenlazar sinapsis a nivel físico, rearmando el grafo de conectividad, preservando memoria local, y evitando que “todo sea software”.
1) Definiciones y conceptos base
1.1 Hard-morphing (morfología de hardware)
Capacidad del sustrato de alterar su conectividad efectiva (grafo), no solo los pesos.
- Soft neuroplasticidad: Δw sobre enlaces existentes.
- Hard neuroplasticidad: creación/eliminación/redistribución de enlaces (ΔE en el conjunto de aristas del grafo).
1.2 Rubik Layer (capa de rewire)
Sub-sistema responsable de:
- reconfigurar rutas entre neuronas sintéticas / nodos memristivos,
- aislar subredes,
- crear “islas” cognitivas,
- reasignar buses y dominios funcionales según demanda.
1.3 Crossbar memristivo
Matriz N×M de celdas resistivas con estados programables de conductancia Gij.
Cada intersección implementa un “puente” o “sinapsis física” reconfigurable.
2) Arquitectura física del HEXAGON (vista capa A)
2.1 Capas funcionales (stack)
- Capa S (Substrate): CNT alignment / metalización base / dieléctrico.
- Capa X (Crossbar): matriz memristiva N×M + selectores.
- Capa N (Neuro): neuronas sintéticas (o módulos neuron-like) + electrodos 3D.
- Capa R (Routing): buses locales + puentes inter-hexagonales.
- Capa P (Protection): sensores, aislamiento, fusibles, clamps.
- Capa C (Control): driver DAC/ADC, programación, lectura, telemetría.
Nota: En v0.1, C y P pueden residir parcialmente “off-chip” para prototipo.
2.2 Topología de interconexión (Rubik)
Cada HEXAGON integra:
- 6 puertos laterales (uno por lado) para acoplar a hexágonos vecinos.
- 1 puerto central (núcleo) para cluster local.
- 3 anillos de conectividad:
- Ring-0 (núcleo): conexiones de alta densidad neuron↔crossbar.
- Ring-1 (intra-hex): rutas entre módulos del hexágono.
- Ring-2 (inter-hex): puentes hacia hexágonos adyacentes.
La “rearmabilidad Rubik” se implementa cambiando:
- qué nodos se conectan,
- por qué rutas,
- con qué acoplamiento Gij,
- bajo qué condiciones de aislamiento.
3) Modelo eléctrico (mínimo viable)
3.1 Sinapsis física como conductancia programable
Cada celda (i,j) del crossbar tiene:
- Conductancia Gij en un rango [Gmin,Gmax]
- Estado discreto o cuasi-continuo (según tecnología)
La corriente a través de la celda:Iij=Gij⋅Vij
y el potencial neto de integración de un nodo postsináptico k:Vk(t)=i∈pre∑wikxi(t)−λVk(t)+η(t)
donde wik se realiza físicamente como Gij (mapeo de índices).
3.2 Rewire como cambio de grafo
Definimos un grafo de conectividad efectiva:G(t)=(V,E(t))
Un rewire es:E(t+Δt)=E(t) ⊕ ΔE
donde ΔE representa enlaces que se agregan o se eliminan.
En crossbar:
- agregar enlace: programar celda Gij→GON
- eliminar enlace: programar celda Gij→GOFF
3.3 Función objetivo del rewire
El controlador busca maximizar utilidad U bajo restricciones:ΔEmax U(performance,energy,stability)
sujeto a:SNR≥θsnr,P≤Pmax,leakage≤Lmax
y políticas Harmonix (en versiones posteriores).
4) Operaciones del Rubik Layer (primitivas)
4.1 PRIM-1: Link-On
- Selecciona celda(s) objetivo.
- Aplica pulso de escritura Vset,tset.
- Verifica lectura (read-verify): Gijread≥GON,min
4.2 PRIM-2: Link-Off
- Aplica pulso Vreset,treset.
- Verifica: Gijread≤GOFF,max
4.3 PRIM-3: Isolate-Island
- Cierra gates de borde + fuerza OFF en crossbar periférico.
- Objetivo: cuarentena, fault containment, entrenamiento local.
4.4 PRIM-4: Bridge-Neighbor
- Abre puerto lateral.
- Programa celdas de interfaz para acoplar hexágonos.
4.5 PRIM-5: Prune-and-Reinforce
- “Poda”: OFF en enlaces de baja contribución.
- “Refuerzo”: ON/↑G en enlaces críticos.
- Criterio típico: ΔUlink<0⇒prune
5) Controlador de rewire (v0.1)
5.1 Funciones mínimas
- Scheduler de rewire (ciclos o eventos).
- Read-verify + rollback local.
- Mapas de calor: actividad, drift, ruido.
- Telemetría: tasa de rewire, consumo, estabilidad.
5.2 Política de disparo de rewire (trigger)
Un rewire se autoriza si:
- mejora performance estimada: ΔP≥θP
- costo energético aceptable: ΔE≤θE
- estabilidad preservada: Δσnoise≤θσ
5.3 “Safety clamps” (sin Harmonix aún)
- Límite de rewire/hora.
- No rewire durante tareas críticas.
- Always-on watchdog: si lectura/ruido se dispara → aislamiento.
6) Materials & Methods — DOE mínimo (v0.1)
Objetivo DOE: validar que el crossbar rewireable es estable, repetible y escalable (dummy + bio opcional).
6.1 Factores DOE (mínimo)
F1 — Alineación CNT (interconect)
- L1: CNT aleatorio
- L2: CNT alineado (campo/plantilla)
F2 — Memristor stack
- L1: Oxide-based (p.ej. HfO₂/Ti)
- L2: Phase-change / ionic drift (según disponibilidad)
F3 — Selector device
- L1: Sin selector
- L2: Con selector (para reducir sneak paths)
F4 — Encapsulado
- L1: Sin encapsulado
- L2: Borosilicato 7740 (bonding moderado)
- L3: Fused silica (óptica superior, más difícil)
Si querés estrictamente 4 variables como pediste: mantenemos “selector” fijo en L2 y nos quedamos con (CNT alignment / memristor stack / encapsulado / espesor). Pero te lo dejé porque “sneak paths” es un killer real en crossbars.
F5 — Espesor de tapa (si hay encapsulado)
- 100 µm / 200 µm / 500 µm
6.2 Métricas (KPIs medibles)
- On/Off ratio: R=GOFFGON
- Retención: deriva de G en 24h / 168h: ΔG/G0
- Endurance: ciclos SET/RESET antes de degradación.
- Variabilidad (device-to-device): CV=μGσG
- Sneak-path leakage (corrientes parásitas).
- Energía por evento de rewire: Eset=∫V(t)I(t)dt
- Latencia rewire: tiempo SET/RESET + verificación.
- Tasa de fallo: celdas stuck-ON/stuck-OFF.
6.3 Go/No-Go (Gate v0.1)
GO si se cumplen simultáneamente:
- R≥103 (ideal 104)
- Retención: ∣ΔG/G0∣≤5% en 24h (dummy)
- Endurance ≥ 106 eventos SET/RESET por celda (mínimo 105 aceptable para demo)
- Leakage total ≤ umbral definido (p.ej. <1% del presupuesto de corriente)
- Read-verify éxito ≥ 95% en lote pequeño
NO-GO si ocurre cualquiera:
- Sneak paths dominan (no se puede leer/programar consistentemente)
- Variabilidad excesiva (CV>30% sin corrección)
- Stuck faults >5% en lote dummy
7) Comparación técnica (para Discussion)
7.1 vs IBM TrueNorth / Intel Loihi
- Ellos: plasticidad principalmente en pesos y rutas lógicas sobre hardware fijo.
- HEXAGON-A: plasticidad también en conectividad física efectiva:
- enlaces se crean/eliminan eléctricamente (hard morphing)
- aislamiento/cuarentena nativa por puertos y crossbar
7.2 vs “neuromórfica suiza” (típico: cultivos neuronales / organoides / control por electrodos)
- Ellos: biología o biohíbrido, pero con ruteo electrónico más estático.
- HEXAGON-A: integra microcircuito reconfigurable en la nanoestructura, haciendo que el soporte no sea “placa”, sino tejido rearmable.
8) Figuras sugeridas (para paper / portal)
- Fig 1: Stack de capas (S/X/N/R/P/C) en corte.
- Fig 2: Hexágono con puertos laterales y rings de conectividad.
- Fig 3: Crossbar N×M con celdas memristivas y selectores.
- Fig 4: Secuencia PRIM-1..5 (Link-On/Off, Bridge, Isolate).
- Fig 5: DOE matrix + KPIs + Gate Go/No-Go.
9) Nota de hipótesis complementarias (proyecto en evolución)
- H-A1: el “Rubik” no requiere mecánica: basta rewire eléctrico + aislamiento por gates.
- H-A2: la combinación CNT-alignment + selector reduce sneak paths por orden de magnitud.
- H-A3: encapsulado (borosilicato vs fused silica) estabiliza drift y ruido, pero puede requerir rediseño de campos (εr).
10) Cierre
HEXAGON Rubik Layer (A) define una microarquitectura mínima operativa para neuroplasticidad real: poda y reenlace por hardware reconfigurable. En términos de ingeniería, el “cubo Rubik” queda formalizado como crossbar + puertos + primitives + criterios de verificación.
Conclusión estratégica
Hexagon permite crecer sin rigidez.
Harmonix permite crecer sin caos.
El Roadmap permite crecer sin fantasía.
Este roadmap transforma SuperGaia de visión avanzada en programa tecnológico ejecutable.
© 2026 SpaceArch Solutions International, LLC, Miami, Florida, USA. All rights reserved. No part of this document may be reproduced, distributed, or transmitted in any form without prior written permission.